Deutsch
Anmelden



| Preis | Negotiated |
| MOQ | 1pieces |
| Lieferzeit | 3-8workding days |
| Marke | melexis |
| Ursprungsort | Taiwan |
| Certification | ROHS |
| Vorbildliches Number | MLX90316KDC-BCG-000 |
| Verpackendetails | Spule |
| Zahlungsbedingungen | T/T, Western Union |
| Versorgungs-Fähigkeit | 5000pcs |
| Brand Name | melexis | Vorbildliches Number | MLX90316KDC-BCG-000 |
| Certification | ROHS | Ursprungsort | Taiwan |
| Mindestbestellmenge | 1pieces | Price | Negotiated |
| Zahlungsbedingungen | T/T, Western Union | Versorgungs-Fähigkeit | 5000pcs |
| Lieferfrist | Tage 3-8workding | Verpackendetails | Spule |
| Lagerbestand | Vorräte | Beschreibung | MLX90316 Melexis Drehpositionssensor-IC MLX90316KDC-BCG-000 |
| Kategorie | Sensoren, Wandler Positionssensoren | Familie | Positionssensoren - Winkel-, Linearpositionsmessung |
| Für die Messung | Drehstellung | Technologie | Hall-Effekt |
| Rotations-Winkel - elektrisch, mechanisch | 0° ~ 360°, kontinuierlich | Ausgabe | Analogspannung |
| Aktuatortyp | Außenmagnet, nicht inbegriffen | Linearität | ± 1 ° |
| Spannung - Versorgung | 4,5 V ~ 5,5 V | Betriebstemperatur | -40 ° C ~ 125 ° C. |
MLX90316 melexis Drehwinkel-Sensor-IC MLX90316KDC-BCG-000 MLX90316KDC-BDG-100-RE mit SPI-AUSGANG
MLX90316 melexis Drehwinkel-Sensor-IC MLX90316KDC-BCG-000 oder MLX90316KDC-BDG-100-RE mit SPI-AUSGANG
Merkmale und Vorteile:
Absoluter Drehwinkel-Sensor-IC
Einfaches und robustes magnetisches Design
Tria⊗is® Hall-Technologie
Programmierbarer Winkelbereich bis zu 360 Grad
Programmierbare lineare Übertragungscharakteristik
Wählbarer analoger (ratiometrischer), PWM-, serieller Protokoll
12 Bit Winkelauflösung - 10 Bit Winkelthermische Genauigkeit
40 Bit ID-Nummer
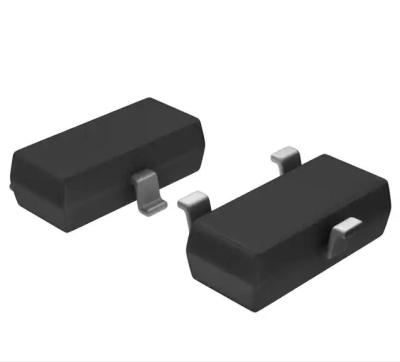
Single Die – SOIC-8-Gehäuse RoHS-konform
Dual Die (vollständig redundant) – TSSOP-16-Gehäuse RoHS-konform
Anwendungen:
Absoluter Drehwinkelsensor
Lenkrad-Positionssensor
Pedal-Positionssensor
Motorwellen-Positionssensor
Drosselklappen-Positionssensor
Schwimmer-Füllstandsensor
Fahrzeughöhen-Positionssensor
Berührungsloses Potentiometer
Beschreibung:
Der MLX90316 ist ein Tria⊗is® Drehwinkelsensor, der die absolute Winkelposition eines kleinen Dipolmagneten liefert, der sich über der Oberfläche des Geräts dreht (Ende-der-Welle-Magnet). Dank eines integrierten Magneto-Konzentrators (IMC) auf seiner Oberfläche erfasst das monolithische Gerät berührungslos die horizontale Komponente der angelegten magnetischen Flussdichte. Dieses einzigartige Messprinzip, das auf einen Drehwinkelsensor angewendet wird, führt zu einer beeindruckenden Robustheit der Winkelposition gegenüber den mechanischen (Luftspalt, Off-Axis) Toleranzen. Die Drehung dieser horizontalen Komponente wird über einen weiten Bereich (bis zu 360 Grad - vollständige Umdrehung) erfasst und vom On-Chip-DSP (Digital Signal Processing) verarbeitet, um letztendlich die absolute Winkelposition des Magneten entweder als ratiometrischen Analogausgang oder als PWM (Pulsweitenmodulation)-Signal oder als 14-Bit-Daten zu melden, auf die über einen 3-Pin-SPI (serielle Schnittstelle)-Kanal zugegriffen werden kann. Die Ausgangsübertragungscharakteristik ist vollständig programmierbar (z. B. Offset, Verstärkung, Klemmpegel, Linearität, thermische Drift, Filterung, Bereich...), um jede spezifische Anforderung durch End-of-Line-Kalibrierung zu erfüllen. Die Melexis-Programmiereinheit PTC-04 kommuniziert und kalibriert das Gerät ausschließlich über die Anschlussklemmen (VDDVSS-OUT).
1. Bestellinformationen
| Produktcode | Temperaturcode | Gehäusecode | Optionscode | Verpackungsformcode |
| MLX90316 | S | DC | BCG-000 | RE |
| MLX90316 | E | DC | BCG-000 | RE |
| MLX90316 | K | DC | BCG-000 | RE |
| MLX90316 | L | DC | BCG-000 | RE |
| MLX90316 | E | GO | BCG-000 | RE |
| MLX90316 | K | GO | BCG-000 | RE |
| MLX90316 | L | GO | BCG-000 | RE |
| MLX90316 | K | DC | BCG-200 | RE |
| MLX90316 | K | GO | BCG-200 | RE |
| MLX90316 | K | DC | BCG-300 | RE |
| MLX90316 | K | GO | BCG-300 | RE |
| MLX90316 | E | DC | BDG-100 | RE |
| MLX90316 | K | DC | BDG-100 | RE |
| MLX90316 | L | DC | BDG-100 | RE |
| MLX90316 | E | GO | BDG-100 | RE |
| MLX90316 | K | GO | BDG-100 | RE |
| MLX90316 | L | GO | BDG-100 | RE |
| MLX90316 | L | GO | BDG-102 | RE |
| MLX90316 | L | DC | BDG-102 | RE |
| MLX90316 | L | DC | BCS-000 | RE |
Legende:
Temperaturcode: S: von -20 °C bis 85 °C
E: von -40 °C bis 85 °C
K: von -40 °C bis 125 °C
L: von -40 °C bis 150 °C
Gehäusecode: “DC” für SOIC-8-Gehäuse
“GO” für TSSOP-16-Gehäuse (Dual-Die)
Optionscode: AAA-xxx: Die-Version
xxx-000: Standard
xxx-100: SPI
xxx-102: SPI75AGC, siehe Abschnitt 13.4.2
xxx-200: PPA (vorprogrammiert analog)
xxx-300: PPD (vorprogrammiert digital)
Verpackungsform: “RE” für Rolle
“TU” für Tube
Bestellbeispiel: MLX90316KDC-BCG-000-TU
Glossar der Begriffe
Gauss (G), Tesla (T) Einheiten für die magnetische Flussdichte - 1 mT = 10 G
TC Temperatur Coefficient (in ppm/°C)
NC Nicht Connected
PWM Pulse Weite Modulation
%DC Duty Cycle des Ausgangssignals, d. h. TON /(TON + TOFF)
ADC Analog-zu-Digital Converter DAC Digital-zu-Analog Converter
LSB Least Signifikant Bit MSB Most Signifikant Bit
DNL Differenzial Non-Linearität INL Integrierte Non-Linearität
RISC Reduziert Instruktion Set Computer
ASP Analog Signal Prozessing DSP Digital Signal Prozessing
ATAN Trigonometrische Funktion: Arkustangens (oder inverser Tangens) IMC Integrierter Magneto-Conzentrator (IMC®)
CoRDiC Coordinate Rotation Digital Computer (d. h. iterative rechteckig-zu-polar-Transformation)
EMC Elektro-Magnetisch Compatibilität
4. Pinbelegung
| PIN |
SOIC-8 TSSOP-16 Analog / PWM Serielles Protokoll Analog / PWM Serielles Protokoll |
1 VDD VDD VDIG1 VDIG1
2 Test 0 Test 0 VSS1 (Masse1) VSS1 (Masse1)
3 Switch OUT /SS VDD1 VDD1
4 Nicht verwendet / OUT 2 (2) SCLK Test 01 Test 01
5 OUT MOSI / MISO Switch OUT2 /SS2
6 Test 1 Test 1 Nicht verwendet2 SCLK2
7 VDIG VDIG OUT2 MOSI2 / MISO2
8 VSS (Masse) VSS (Masse) Test 12 Test 12
9 VDIG2 VDIG2
10 VSS2 (Masse2) VSS2 (Masse2)
11 VDD2 VDD2
12 Test 02 Test 02
13 Switch OUT1 /SS1
14 Nicht verwendet1 SCLK1
15 OUT1 MOSI1 / MISO1
16 Test 11 Test 11
Für optimales EMV-Verhalten wird empfohlen, die unbenutzten Pins (Nicht verwendet und Test) mit der Masse zu verbinden.
5. Absolute Maximalwerte
Parameter Wert
Versorgungsspannung, VDD (Überspannung) + 20 V
Verpolungsschutz - 10 V
Positive Ausgangsspannung – Standardversion + 10 V
(Analog oder PWM) + 14 V (max. 200 s – TA = + 25 °C)
Positive Ausgangsspannung – SPI-Version VDD + 0,3 V
| Positive Ausgangsspannung (Switch Out) |
+ 10 V + 14 V (max. 200 s – TA = + 25 °C) |
Ausgangsstrom (IOUT) ± 30 mA
Verpolungsausgangsspannung - 0,3 V
Verpolungsausgangsstrom - 50 mA
Betriebsumgebungstemperaturbereich, TA - 40 °C … + 150 °C
Lagertemperaturbereich, TS - 40 °C … + 150 °C
Magnetische Flussdichte ± 700 mT
Das Überschreiten der absoluten Maximalwerte kann zu dauerhaften Schäden führen. Exposition gegenüber absoluten Maximal-
Nennbedingungen über längere Zeiträume kann die Zuverlässigkeit des Geräts beeinträchtigen.
| (Broken Track Diagnostic) (7) | BVSSPU |
Broken VSS (8) & Pull-up-Last RL ≥ 1 kΩ |
99 100 %VDD | |||||||||||||
| BVDDPD |
Broken VDD (8) & Pull-down-Last RL ≥ 1 kΩ |
0 1 %VDD | ||||||||||||||
| BVDDPU |
Broken VDD & Pull-up-Last auf 5 V |
Keine Broken Track Diagnose %VDD |
||||||||||||||
| Geklemmter Ausgangspegel (9) |
Clamp_lo Programmierbar 0 100 %VDD Clamp_hi Programmierbar 0 100 %VDD |
|||||||||||||||
| Switch Out (10) |
Sw_lo Pull-up-Last 1,5 kΩ bis 5 V 0,55 1,1 V Sw_hi Pull-up-Last 1,5 kΩ bis 5 V 3,65 4,35 V |
|||||||||||||||
7. Isolationsspezifikation
DC-Betriebsparameter bei VDD = 5 V (sofern nicht anders angegeben) und für TA wie durch die
Temperatur-Suffix (S, E, K oder L) angegeben. Nur gültig für den Gehäusecode GO, d. h. Dual-Die-Version.
Parameter Symbol Testbedingungen Min Typ Max Einheiten
Isolationswiderstand zwischen den Dies 4 MΩ
8. Timing-Spezifikation
DC-Betriebsparameter bei VDD = 5 V (sofern nicht anders angegeben) und für TA wie durch die
Temperatur-Suffix (S, E, K oder L) angegeben.
Parameter Symbol Testbedingungen Min Typ Max Einheiten
| Haupttaktrate Ck |
Langsamer Modus (11) Schneller Modus (11) |
7 20 |
MHz MHz |
|||||||||||||
| Abtastrate |
Langsamer Modus (11) Schneller Modus (11) |
600 200 |
μs μs |
|||||||||||||
| Schrittantwortzeit Ts |
4 600 |
ms μs |
||||||||||||||
Watchdog Wd Siehe Abschnitt 14 5 ms
Start-up-Zyklus Tsu Langsamer und schneller Modus (11) 15 ms
| Anstiegsrate des Analogausgangs |
COUT = 42 nF COUT = 100 nF |
200 100 |
V/ms V/ms |
PWM-Frequenz FPWM PWM-Ausgang aktiviert 100 1000 Hz
| Anstiegszeit des Digitalausgangs |
Modus 5 – 10 nF, RL = 10 kΩ Modus 7 – 10 nF, RL = 10 kΩ |
120 2.2 |
μs μs |
|||||
| Fallzeit des Digitalausgangs |
Modus 5 – 10 nF, RL = 10 kΩ Modus 7 – 10 nF, RL = 10 kΩ |
1.8 1.9 |
μs μs |
|||||
Gehäuseinformationen: